[toc]
定义
强化学习(Reinforcement learning,RL)讨论的问题是一个智能体(agent) 怎么在一个复杂不确定的 环境里面去极大化它能获得的奖励。通过感知所处环境的 状态(state) 对 动作的 反应(reward), 来指导更好的动作,从而获得最大的 收益(return),这被称为在交互中学习,这样的学习方法就被称作强化学习。
特点
强化学习是除了监督学习和非监督学习之外的第三种基本的机器学习方法。
- 监督学习 是从外部监督者提供的带标注训练集中进行学习。 (任务驱动型)
- 非监督学习 是一个典型的寻找未标注数据中隐含结构的过程。 (数据驱动型)
- 强化学习 更偏重于智能体与环境的交互, 这带来了一个独有的挑战 ——“试错(exploration)”与“开发(exploitation)”之间的折中权衡,智能体必须开发已有的经验来获取收益,同时也要进行试探,使得未来可以获得更好的动作选择空间。 (从错误中学习)
强化学习主要有以下几个特点:
- 试错学习:强化学习一般没有直接的指导信息,Agent 要以不断与 Environment 进行交互,通过试错的方式来获得最佳策略(Policy)。
- 延迟回报:强化学习的指导信息很少,而且往往是在事后(最后一个状态(State))才给出的。比如 围棋中只有到了最后才能知道胜负。
元素
- 环境(Environment) 是一个外部系统,智能体处于这个系统中,能够感知到这个系统并且能够基于感知到的状态做出一定的行动。
- 智能体(Agent) 是一个嵌入到环境中的系统,能够通过采取行动来改变环境的状态。
- **状态(State)/观察值(Observation)**:状态是对世界的完整描述,不会隐藏世界的信息。观测是对状态的部分描述,可能会遗漏一些信息。
- **动作(Action)**:不同的环境允许不同种类的动作,在给定的环境中,有效动作的集合经常被称为动作空间(action space),包括离散动作空间(discrete action spaces)和连续动作空间(continuous action spaces),例如,走迷宫机器人如果只有东南西北这 4 种移动方式,则其为离散动作空间;如果机器人向 360◦ 中的任意角度都可以移动,则为连续动作空间。
- **奖励(Reward)**:是由环境给的一个标量的反馈信号(scalar feedback signal),这个信号显示了智能体在某一步采 取了某个策略的表现如何。
术语
策略(Policy)
策略是智能体用于决定下一步执行什么行动的规则。可以是确定性的,一般表示为:μ:$$a_t=μ(s_t)$$
也可以是随机的,一般表示为 π:$$a_t~ π(⋅|(s_t)$$
状态转移(State Transition)
状态转移,可以是确定的也可以是随机的,一般认为是随机的,其随机性来源于环境。可以用状态密度函数来表示:
$$p(s^′∣s,a)=P(S^′=s^′∣S=s,A=a)$$
环境可能会变化,在当前环境和行动下,衡量系统状态向某一个状态转移的概率是多少,注意环境的变化通常是未知的。
回报(Return)
回报又称cumulated future reward,一般表示为U,定义为
$$U_t=R_t+R_{t+1}+R_{t+2}+R_{t+3}+⋯$$
其中Rt表示第t时刻的奖励,agent的目标就是让Return最大化。
未来的奖励不如现在等值的奖励那么好(比如一年后给100块不如现在就给),所以Rt+1的权重应该小于Rt。因此,强化学习通常用discounted return(折扣回报,又称cumulative discounted future reward),取γ为discount rate(折扣率),γ∈(0,1],则有,
$$U_t=R_t+γR_{t+1}+γ^2R_{t+2}+γ^3R_{t+3}+⋯$$
价值函数(Value Function)
举例来说,在象棋游戏中,定义赢得游戏得1分,其他动作得0分,状态是棋盘上棋子的位置。仅从1分和0分这两个数值并不能知道智能体在游戏过程中到底下得怎么样,而通过价值函数则可以获得更多洞察。
价值函数使用期望对未来的收益进行预测,一方面不必等待未来的收益实际发生就可以获知当前状态的好坏,另一方面通过期望汇总了未来各种可能的收益情况。使用价值函数可以很方便地评价不同策略的好坏。
- **状态价值函数(State-value Function)**:用来度量给定策略π的情况下,当前状态st的好坏程度。
- **动作价值函数(Action-value Function)**:用来度量给定状态st和策略π的情况下,采用动作at的好坏程度。
算法分类
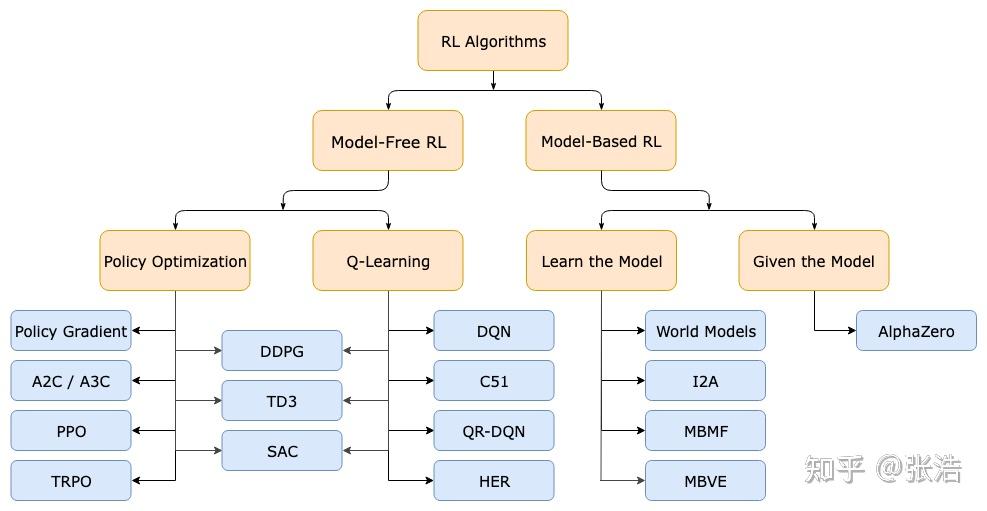
按照环境是否已知划分:免模型学习(Model-Free) vs 有模型学习(Model-Based)
- Model-free就是不去学习和理解环境,环境给出什么信息就是什么信息,常见的方法有policy optimization和Q-learning。
- Model-Based是去学习和理解环境,学会用一个模型来模拟环境,通过模拟的环境来得到反馈。Model-Based相当于比Model-Free多了模拟环境这个环节,通过模拟环境预判接下来会发生的所有情况,然后选择最佳的情况。
按照学习方式划分:在线策略(On-Policy) vs 离线策略(Off-Policy)
- On-Policy是指agent必须本人在场, 并且一定是本人边玩边学习。典型的算法为Sarsa。
- Off-Policy是指agent可以选择自己玩, 也可以选择看着别人玩, 通过看别人玩来学习别人的行为准则, 离线学习同样是从过往的经验中学习, 但是这些过往的经历没必要是自己的经历, 任何人的经历都能被学习,也没有必要是边玩边学习,玩和学习的时间可以不同步。典型的方法是Q-learning,以及Deep-Q-Network。
按照学习目标划分:基于策略(Policy-Based)和基于价值(Value-Based)。
- Policy-Based的方法直接输出下一步动作的概率,根据概率来选取动作。但不一定概率最高就会选择该动作,还是会从整体进行考虑。适用于非连续和连续的动作。常见的方法有Policy gradients。
- Value-Based的方法输出的是动作的价值,选择价值最高的动作。适用于非连续的动作。常见的方法有Q-learning、Deep Q Network和Sarsa。
- 更为厉害的方法是二者的结合:Actor-Critic,Actor根据概率做出动作,Critic根据动作给出价值,从而加速学习过程,常见的有A2C,A3C,DDPG等。
If you like this blog or find it useful for you, you are welcome to comment on it. You are also welcome to share this blog, so that more people can participate in it. If the images used in the blog infringe your copyright, please contact the author to delete them. Thank you !